JMRI may be configured to use the Digitrax PR4 in a variety of ways. Exactly how the PR4 will be used depends each user's requirements. JMRI may be configured to use the PR4 to control a "Standalone Programming Track". JMRI may instead be configured to use the PR4 to give general access to the command station (including command station programming track) and LocoNet. A third option allows JMRI to interact with a "Standalone LocoNet". JMRI does not prefer any one method method over any other method. You may even set up multiple JMRI "configuration profiles", each with a different PR4 mode; you choose which one to use whenever you start JMRI. Which PR4 mode(s) you use depends on your needs. The table below summarizes these methods.
| Usage | Settings in JMRI Connection Profile | Available JMRI Capabilities | |
|---|---|---|---|
| System Connection | JMRI Command Station Type | ||
| Decoder Programming on PR4 Programming Track | "PR4" | "PR4 Standalone Programmer" | Program decoder CVs on the PR4's dedicated programming track |
| Operate one loco on the dedicated programming track | |||
| LocoNet Interface, Decoder Programming | "PR4" | "(a command station)" | Program decoder CVs on the dedicated programming track and/or the main track |
| Control one or more locos on the main track | |||
| Control and monitor LocoNet-connected Switches, Sensors, and Transponding | |||
| Configure some LocoNet devices | |||
| Control or monitor the LocoNet Fast Clock | |||
| Update firmware on some LocoNet devices | |||
| etc. | |||
| Standalone LocoNet | "PR4" | "Standalone LocoNet" | |
| Control and monitor LocoNet-connected Switches, Sensors, and Transponding | |||
| Configure some LocoNet devices | |||
| Control or monitor the LocoNet Fast Clock | |||
| Update firmware on some LocoNet devices | |||
| etc. | |||
When setting up a JMRI "connection profile" for a PR4, which "command station" should you use when configuring JMRI? That depends on what you intend to do with JMRI.
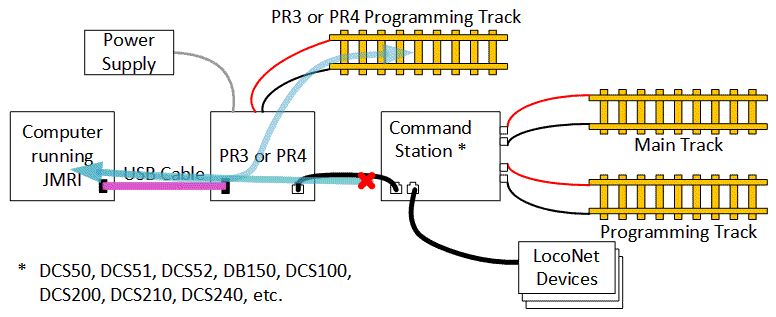
When the PR4 is configured to act as a programmer, it is connected to a dedicated programming track via the screw terminals on the PR4. A separate power supply, such as the PS14, must be used with the PR4 in this case. When JMRI is properly configured, JMRI can use the PR4 programming track to set CVs in any decoder that DecoderPro supports.
This mode of operation can also be used to download sound information into Digitrax sound decoders and, within its limited current capability, run one locomotive to test it. When used with Digitrax SFX decoders, "neutral mode" allows you to vary the speed without the motor moving the decoder, so you can hear how the locomotive sound reacts to varying speeds.
Note that Digitrax only guarantees programming for Digitrax SFX decoders with properly installed loads, etc, but our testing has found that the PR4 will work with many common decoders.
When configured as a standalone programmer, the PR4 is not able to communicate with the command station or any LocoNet peripherals. The red "X" in the diagram above denotes this limitation.
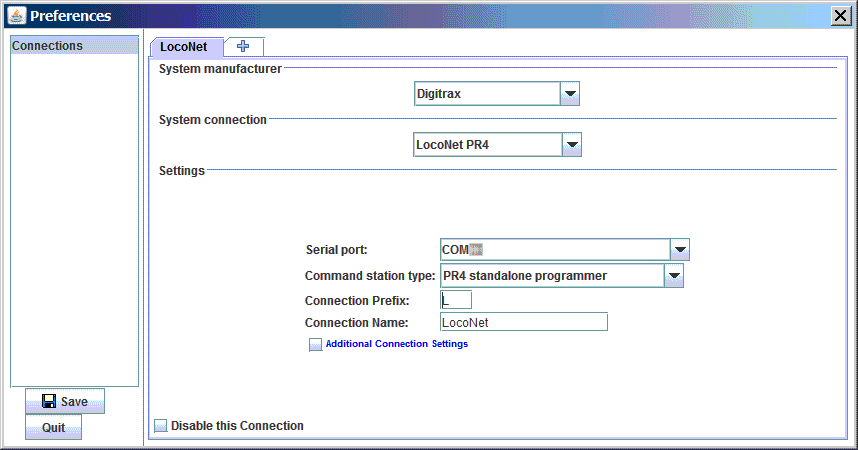
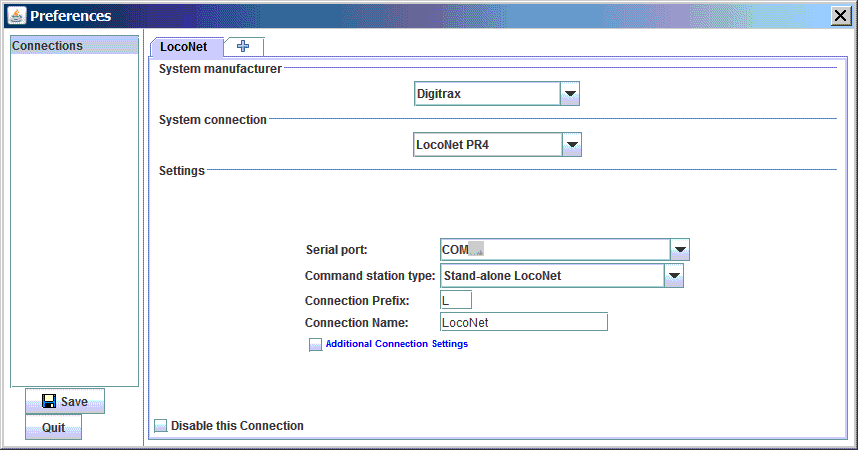
To set up JMRI to use the PR4 via the dedicated decoder programming track mode:
The "connection" preferences should look similar to this image:
You can use a JMRI throttle to control the locomotive connected to the PR4 dedicated programming track. Use the JMRI Power Control or the "Power" menu item on the Throttle's menu bar to turn on track power, and then you can operate the locomotive normally.
The PR4 can only provide very limited current to its programming track, so Digitrax has built a "neutral mode" into their sound decoders. When JMRI and the PR4 is running a Digitrax sound decoder, the motor is disconnected to reduce the current load. You can still ramp the speed up and down with the throttle and listen to how the sound responds, but the motor won't move the locomotive.
Other decoders, including decoders from other manufacturers, may draw enough motor current to trip the PR4 internal circuit breakers. This will cause JMRI to mark track power as "off". Just wait a couple seconds and turn the track power back on to recover.
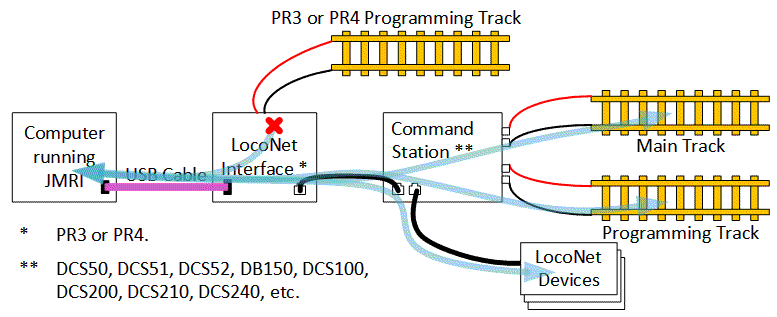
When acting as a LocoNet interface, the PR4 allows JMRI to interact with devices connected to LocoNet. This includes programming decoders on a programming track attached to a LocoNet command station. Where the LocoNet command station supports "programming on the main", JMRI is able to make use of that feature.
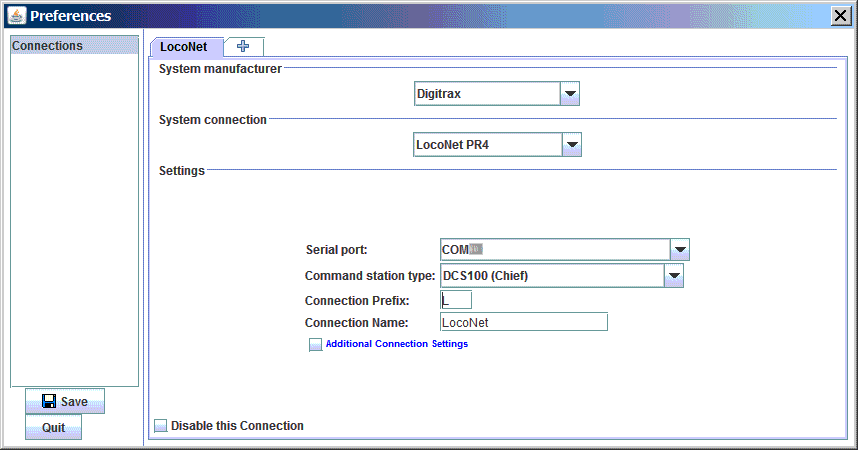
To set up JMRI to use the PR4 via the dedicated decoder programming track mode:
The "connection" preferences should look similar to this image:
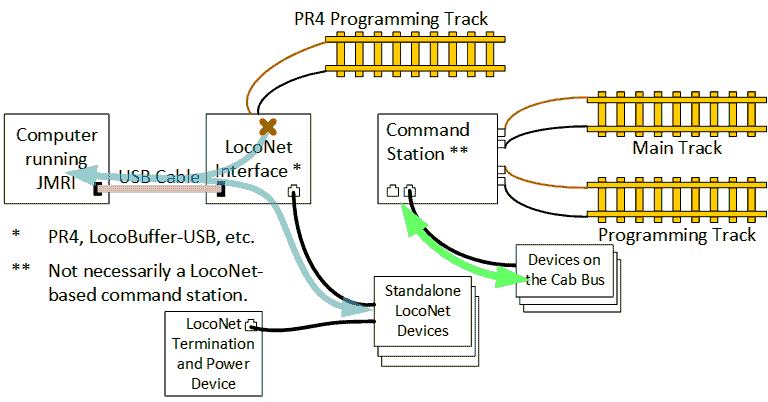
The PR4 can also be used to connect JMRI to a "Standalone LocoNet", which may be useful when LocoNet is used for some aspects of layout control while some other control system is use for other aspects. An example may be track occupancy detection and signaling using Digitrax BDL168 and SE8C boards while locomotive control is provided by a non-LocoNet DCC system. More information on this advanced topic is available on the Standalone LocoNet page.
Note that the PR4 is unable to provide either RailSync power or LocoNet data signal termination to the Standalone LocoNet. This is a significant departure from the PR3 design. If you replace a PR3 with a PR4 in a Standalone LocoNet application, you will need to provide some other source of RailSync power and LocoNet data termination the Standalone LocoNet page for more details.
To set up JMRI to use the PR4 to connect to a Standalone LocoNet:
The PR4 needs to have a driver installed when used with any Microsoft Windows Operating System. See the PR4 support articles at the web links for the PR4. Make sure to follow the instructions exactly, particularly about the order of installing the drivers and plugging in the device. Note that the PR4 makes use of the PR3 drivers.
Digitrax makes its drivers available on its website on the Downloads page.
You don't need to install a separate driver when using current versions of Mac OS X or Linux.
LocoNet® is a registered trademark of Digitrax, Inc.