JMRI can connect to a Digikeijs DR5000 Digicentral command station, or the new YAMORC command stations via a network connection or USB connection.
Please report your results.
To configure the connection:
Providing that the Digikeijs DR5000 unit has been configured to use "LocoNet over TCP/IP LBServer" protocol (Firmware version 1.3.0 when writing this documentation)
Then, set the JMRI connection preferences to:
Turnout, Sensor, Signal and Throttle support is available for a JMRI-connected DR5000 unit.
The S88 bus on the DR5000 (whether in use or not) is configured by default to think it has one 16-channel input device connected. The S88 and LocoNet busses apparently share addresses. Whenever an input from LS0 to LS15 goes HIGH on LocoNet, the S88 bus says 'NOPE'. The resulting LOW signal is in turn broadcast onto the LocoNet bus. Set the number of connected S88 units to zero in the (Windows) configuration application. (thanks to Steve R. Jan. 2018)
The Digikeijs DR4088LN and DR50018RC decoders can report occupancy state via LocoNet.
The DR5088RC handles RailCom and is configurable via LNCV programming.
The Digikeijs DR4018 decoder can drive turnouts with several protocols.
The DR4024 can drive 4 servos.
Both are configurable in DecoderPro as a roster entry at address 9999.
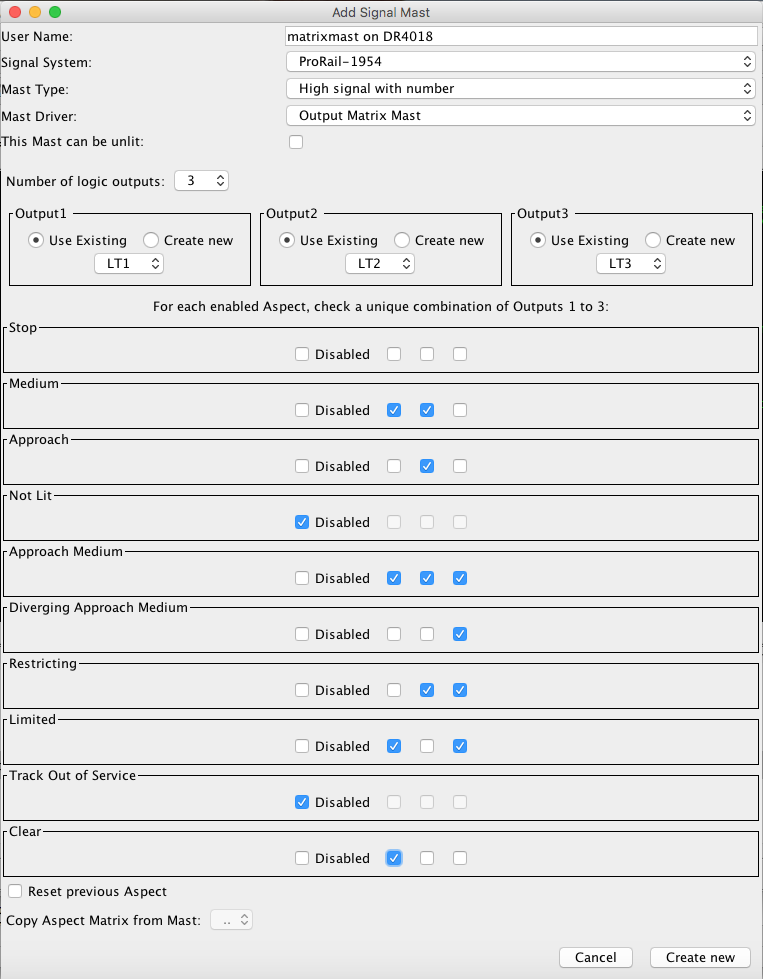
The Digikeijs DR4018 decoder can be configured for signaling using DecoderPro.
To configure the signal Masts, use the Matrix Signal
Mast driver.
The Add Mast settings are:
For more information on how to connect and use YAMORC products, refer to the following. The old DR5000 works in a similar way.